来源: 二师兄玩车
更新时间:2022-09-14 23:42:40点击:
——本文系《二师兄研究所》第51期
前两天玩游戏,发现在某部大型开放式游戏中,整个城市的交通秩序井井有条。
如果不是玩家去“挑事儿”,由AI控制的NPC车辆完全不会造成拥堵、事故等问题。


当我们想要解决一个问题的时候,必然需要先搞清楚这个问题是如何造成的。
针对道路交通中的拥堵问题,其实成因主要有三方面:人、基建、事故。
人的原因,在于不少驾驶者因为走神或者玩手机,导致红绿灯路口起步慢、在环路或高速上喜欢以“龟速”占用最左侧车道或者频繁地无理由刹车等情况发生,从而导致后方车辆挤压,出现“幽灵堵车”的问题。
在“人类驾驶时代”,这个问题基本上无解,因为,司机与司机之间的差异始终存在。

基建的原因,在于道路修建的不合理。
比如,某条高速是四车道,但是在高速结束之后,四条车道汇合成三条甚至是两条。此时,如果遇到高峰时段,再遇到某些善于插队的“聪明人”,前面也会分分钟堵给你看。
当然,基建这个问题是可以解决的,通过扩建或者分流等举措就能够解决。
至于事故导致拥堵的问题,不用多说,相信大家都遇到过。
但是,你知道事故是怎么产生的吗?
其实除了驾驶者的操作失误之外,还有汽车发生机械故障、路况或者天气状况不好等各种客观原因。
乍一看,要想解决因为人、基建、自然环境所导致的拥堵、事故等问题,似乎是一件很麻烦的事情,以目前的发展形势来看,几乎难以做到。
答案是肯定的!
在目前,不少车企都推出了所谓的“高阶智能驾驶技术”。
拥堵辅助、高速领航等一应俱全。
其实说到底,现在这些L2级、L2+级或者说是L3级智驾技术,它们核心目的在于降低本车驾驶者的工作强度而非提升道路状况的健康程度。

举个例子:在上下班的时候,我最讨厌跟在一些智能电动车的后方。
为啥?
因为他们很喜欢打开智能辅助驾驶功能,自动停车、自动跟车起步……
在红绿灯跟车起步的时候,这些车往往会在前车起步很久之后才缓缓蠕动,大幅降低了整个红绿灯路口的通信效率。
打个比方,按照正常的人工驾驶效率,一分钟的时间可以通过20辆车,那么,在这些自动跟车系统的“帮助下”,智能车的驾驶员的操作的确是方便了,但是一分钟内的通行效率却降低到了15辆左右。
除了拥堵之外,当下的智能辅助驾驶系统还有可能造成事故。
相信大家都看过智能车型因为智能辅助驾驶系统造成事故的新闻,有的车因为没有识别到锥形桶,一股脑地扎进了施工区域;有的车因为识别不到异型车或者停在路中间的车,也是一股脑扎上去……

从这个角度来看,目前的智能驾驶辅助技术,不仅不能缓解道路拥堵和事故的问题,甚至还有可能还会帮倒忙。
所以,想要真正解决这些问题,车企们还有很长的路要走。
或者这样说,光靠车辆自身的感知系统,无法把道路上的所有细节信息都给事无巨细地全面搜集进来。
而且,在处理逻辑中,往往也会遇到一些伦理问题,比如前方碰撞已经不可避免,到底是狠狠撞上去“伤害自己”还是紧急侧方避让去“伤害无辜”?
接下来,我们就把这几个要素融合在一起,分析一番。
在当下,很多车企都先一步推出了V2X、V2L等车路协同技术。
在一个城市或者一条道路上,有无数个道路环境感知系统和无数辆车,也有一个“大脑”即车路协同的信息管理中心。
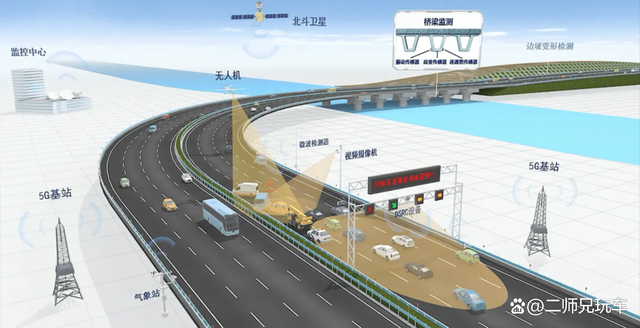
道路上的环境感知系统,可以查看当前的交通环境信息、道路抓地力系数、环境温度、是否有事故等信息,在收集信息后,道路上的环境感知系统将这些信息传递给信息处理中心。
信息处理中心在收到输入后,可以迅速计算出车辆最高效、最安全的行驶方案,并且把这些信息分发给道路上的每一辆车,从而让这些车辆在合适的时候变道、在合适的时候转向、以合适的速度行驶。
举个例子,当环境感知系统检测到全程路况良好的时候,车辆能够以最高速度限速行驶,而在遇到一些意外状况的时候,车辆能够即时规避。
甚至,在极端天气状况下,车辆自身传感部件无法使用之时,车辆还可以通过无线电连接道路的基建系统,通过道路上的“外设”为车型进行导航。

另外,由于信息处理中心对每一辆车的统一调度,这样还可以避免驾驶者的问题。
当然更重要的是,每一个区域内的道路信息处理中心,可以和周边的信息处理中心联动。
比如,北京市区的信息处理中心就需要和周边高速上的信息处理中心联动。两者之间互通有无,把上下高速、进出城的车辆信息、车流规模传递给对方,从而方便对方进行处理,确保各个区域之间的顺畅。
这样一来,倒是能够让我们看到一些零拥堵、零事故的曙光。
想要车路协同系统运行得顺畅,也需要高度统一的设计,就像是“车同轨”一样。
例如,在指挥系统统一调度车路进行加减速的时候,此时车辆的加速性能和刹车性能必须要在一个水平线上,才能满足同步加减速的需求来确保步调的统一。

另外,在未来,为了便于管理,车辆的尺寸也会相对比较统一。
A、B、C等不同级别的车型,其尺寸需要有一个限定值,在这一数值内,可以让调度系统精确地对每一辆车转弯半径做出判断,在车辆掉头、小半径转向时提前确定“一把过”的位置,从而使得道路交通更加精确、高效。

此时,我只需要手动把车辆开出小区地库,当车辆来到主路的时候,有一个自动驾驶汽车的“预通行区域”,这个区域类似于高速的收费站,在内部可以完成自动驾驶身份的识别认证以及对车辆车况安全性的一个快速验证,并在完成后启动完全的自动驾驶功能。
于是,咱们就可以直接脱手让车辆自动加速、并入主要车道了。
当然,如果想要体验手动驾驶乐趣的话,我们也可以走旁边的普通车道,全程手动控制车辆,享受车辆的驾驶乐趣。
比如当前提到的“汽车共享化”,就是未来发展的一个很好思路。
其实,从“轨道交通”的设想出发,未来电动车的续航问题也可能会得到很大程度的改善。
当车辆没电的时候,系统会自动让你在这条道路上行驶。
此时,通过道路预埋的无线充电系统或者说是移动充电缆,就能实现车辆行驶过程中的对接补能,打消纯电动汽车的续航焦虑问题。
其实在我们的畅想之中,未来无拥堵、无事故的道路交通并非是无法实现的,只不过,这需要投入巨大的人力、物力和财力,从车辆的规范化、标准化再到自动驾驶技术的普及甚至是智能道路基础建设的完善,每一环都需要做好。但是我相信,随着技术的发展和进步,咱们今天所畅想的交通模式,也总有能够实现的那一天。
声明:转载此文是出于传递更多信息之目的,无商业用途,若有来源标注错误或侵犯了您的合法权益,请作者持权属证明与本网联系,我们将及时更正、删除,谢谢。






